本篇笔记概述了二叉搜索树的基本概念及其变种,包括 AVL 树、Splay 树、红黑树和 B+ 树。首先介绍了 AVL 树的定义、插入和删除操作,以及如何维护树的平衡。接着讨论了 Splay 树的旋转操作和均摊分析,随后介绍了红黑树的插入和删除策略,最后讲解了 B+ 树的结构特性及其分裂和插入过程。整体上,笔记提供了对这些数据结构的深入理解和操作方法。(由 gpt-4o-mini 生成摘要)
1. AVL Tree
Adelson-Velskii-Landis Trees 分别是论文的三位作者的名字。 Fun Fact:AVL 树名字的由来
- 空二叉树是一个 AVL 树(AVL tree)。
- 如果 T 是一棵 AVL 树,那么其左右子树也是 AVL 树,并且 ,其中 是子树 的高度。
- 树高为 。
平衡因子(balance factor):右子树高度 左子树高度。(按照定义,对于任意节点都有 )
用 表示树高为 的 AVL 树最少有多少个节点。 注意到 的通项是类似于斐波那契数列的。同理树高为 的 AVL 树最多的节点数 也是指数级的,故 AVL 树的树高为 。 证明:树高为
1.1. Insertion
先与一般的二叉平衡树类似,先进行一次失败的查找,可以定位要插入的位置。插入的位置一定是一个叶子节点。之后自底向上检查有没有节点的平衡被破坏,如果有,其 值要么为 要么为 。我们分类讨论进行调整。
称平衡被破坏的节点为失衡节点(trouble finder),导致平衡被破坏的节点(即刚插入的节点)为肇事者(trouble maker),只需要对于 trouble finder & maker 之间的子树进行调整。
在调整平衡时,我们只需要关注 trouble finder:
- 是左子树偏重()还是右子树偏重()?
- 是偏重的子树的左子树偏重还是偏重的子树的右子树偏重?
这里以左子树偏重()为例,右子树偏重的情况是对称的。当左子树的左子树偏重()时,需要执行单旋(single rotation):
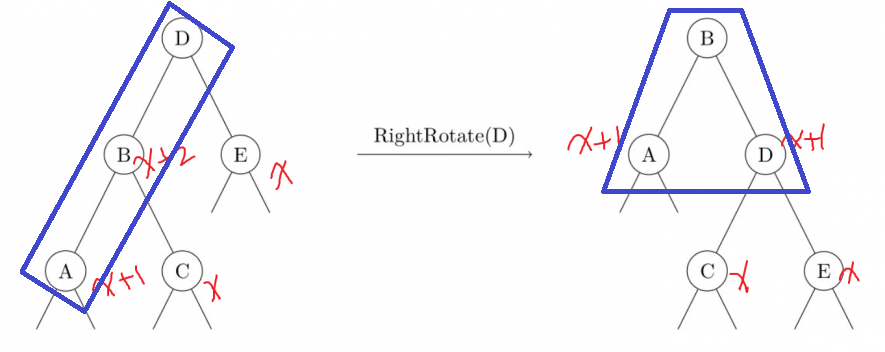 单旋(红色标注的是树高)
单旋(红色标注的是树高)
重点关注蓝框框出的节点在旋转前后的变化(右旋的情况与左旋对称)。 Hint:AVL 树的左旋和右旋
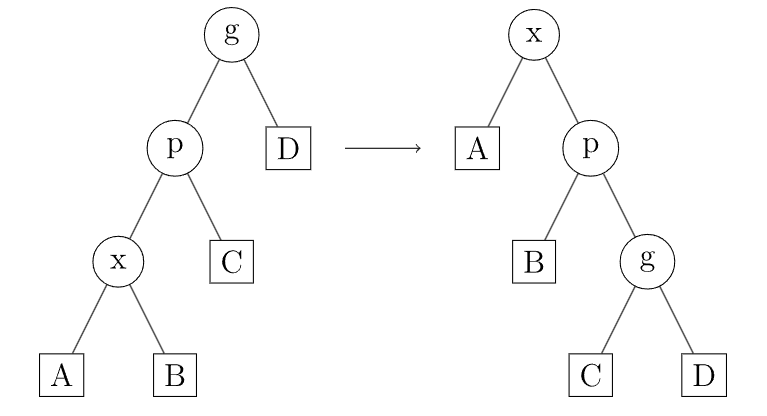
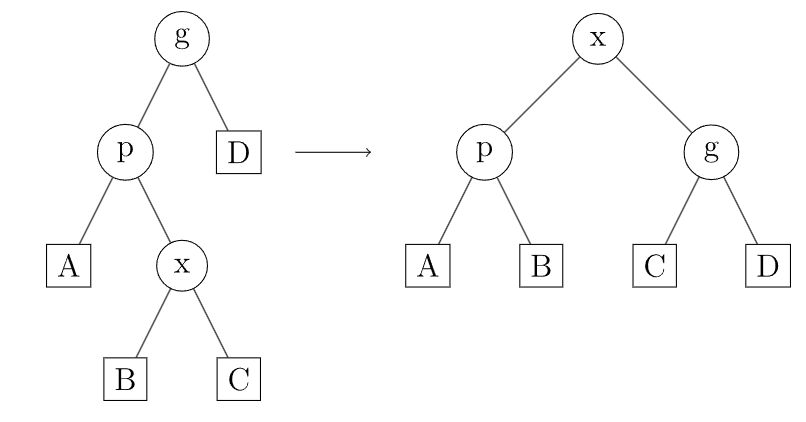
当左子树的右子树偏重时(),需要执行双旋(double rotation):
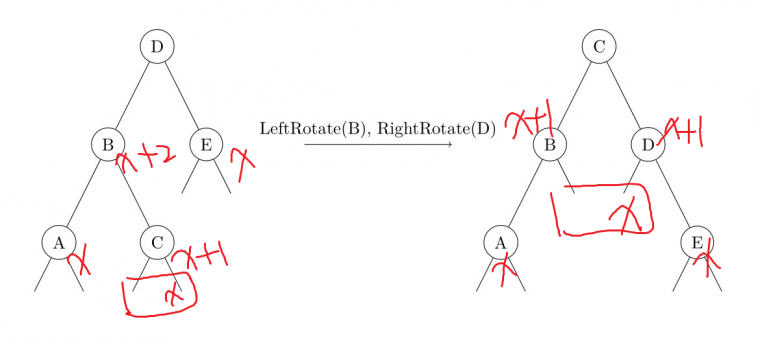 双旋
双旋
观察需要被旋转的点(),只通过一次旋转不能维护其中序遍历不变的性质。 Q:为什么双旋?
容易发现,只需要在离 trouble maker 最近的 trouble finder 处进行一次单旋或双旋即可,因为旋转后 trouble finder 处的树高与插入节点前相同,在它上面的节点的 BF 值应与插入节点前相同。
维护平衡操作的伪代码如下:
Maintain-Balanced(p)
if h[ls[p]] - h[rs[p]] == 2
if h[ls[ls[p]]] >= h[rs[ls[p]]]
Right-Rotate(p)
else
Left-Rotate(ls[p])
Right-Rotate(p)
else if h[ls[p]] - h[rs[p]] == -2
if h[ls[rs[p]]] <= h[rs[rs[p]]]
Left-Rotate(p)
else
Right-Rotate(rs[p])
Left-Rotate(p)1.2. Deletion
先定位要删除的节点,如果是叶子则直接删除,否则找到其前驱(左子树中最右的节点)或后继(右子树中最左的节点)将其替换。这样可以保证每次删除操作实际删掉的点一定是叶子。
删除节点后也要应用调整操作,维护平衡的方法类似插入操作。
2. Splay Tree
生长树(Splay Tree) 单次操作的均摊成本(averaged cost) 为 ,但最坏情况下单次是 的。
2.1. Rotate
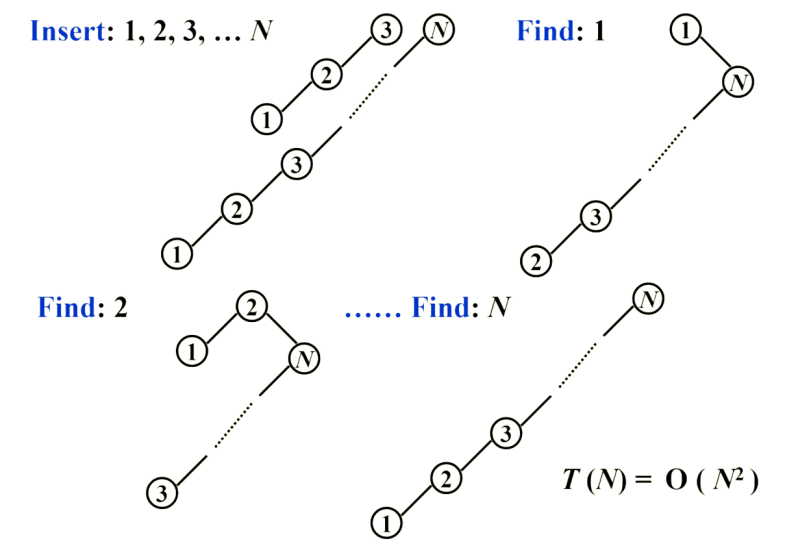
Splay 树的核心思想是每次将被访问的节点旋转到根,称为 Splay 操作。如果还是用前面的旋转方式,复杂度是可能被卡到 的:
这里需要引入 Splay 的旋转方式:设当前节点 的父节点为 ,父节点的父节点为 都存在。定义对 的旋转操作 为将 旋转到 的位置,即 的父亲将变为 ,且维持平衡树的中序遍历不变。当 是 的左孩子时定义这样的旋转为右旋,当 是 的右孩子时定义这样的旋转为左旋。
(注意这里的 函数的参数和上文 AVL 树中的说法并不一样,即 对应着 或 ,至于到底是哪个取决于 和 的位置关系。相当于一个说的时转上来,另一个说的是转下去,所以还需要讨论是从左边还是右边下去)
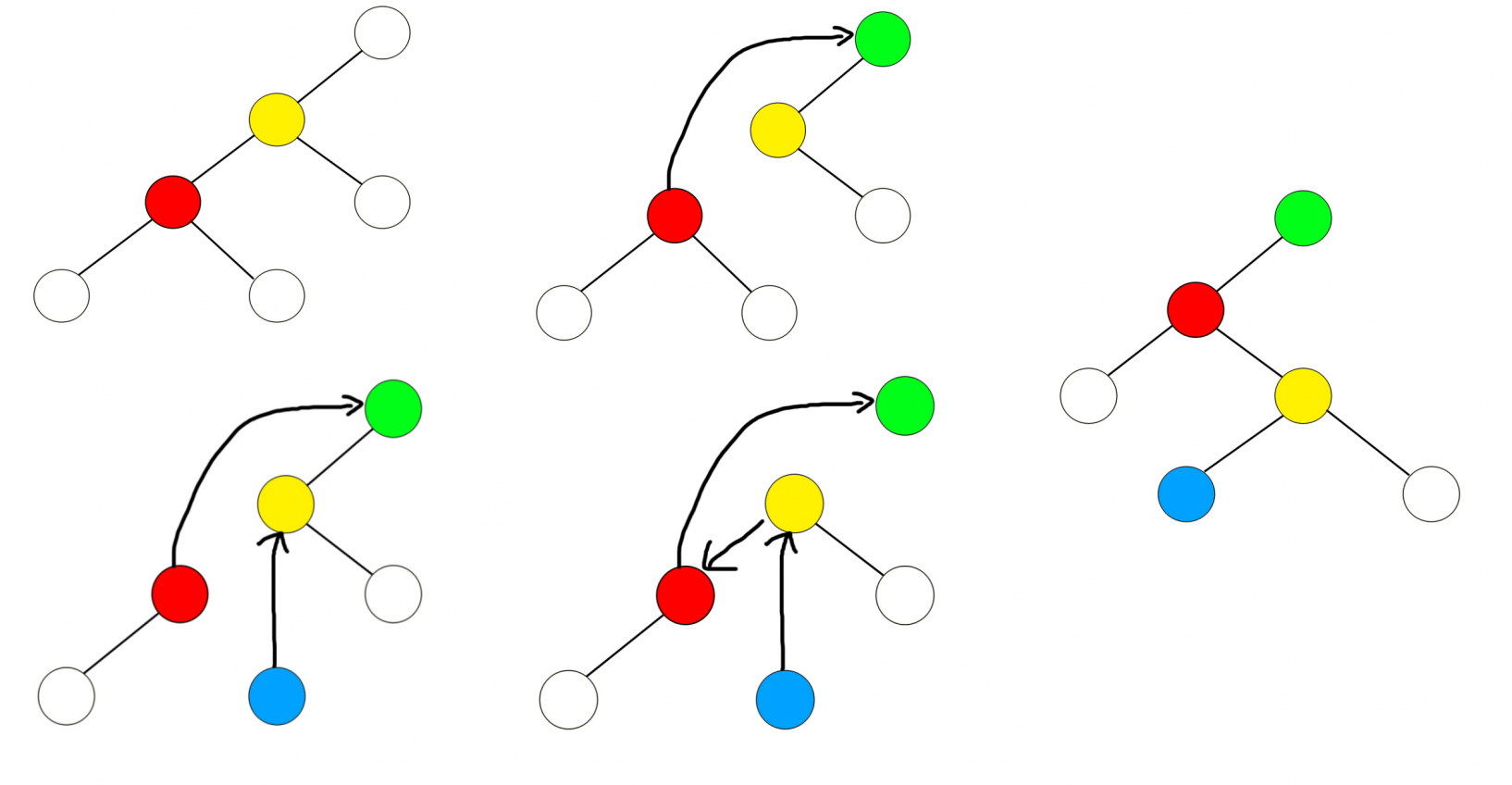 (这里红色节点代表 X,黄色节点代表 P)
(这里红色节点代表 X,黄色节点代表 P)
可以通过精巧的实现让代码自行决定左旋还是右旋,下文我们也直接用 操作来表示(自动决定的)左旋或右旋。
接下来:讨论 是否在同一直线上。若在,则应用 Zig-Zig 操作,旋转 (虽然旋转的不是同一个点,但是两次旋转的方向相同):
 Zig-Zig
Zig-Zig
若不在,则应用 Zig-Zag 操作,旋转 (虽然都是旋转同一个点,但是两次旋转的方向不同):
 Zig-Zag
Zig-Zag
这样子 Splay 树的复杂度将会得到保证,具体证明参见下面的均摊分析(amortized analysis) 环节。
2.2. Amortized Analysis
均摊分析(amortized analysis) 分为三种:
- 聚合分析(aggregate analysis):总时间复杂度为 ,则单次操作的均摊复杂度为 。
- 核算法(accounting method):每消耗 的时间进行操作,就为之后的操作累计 的信用。操作要么消耗时间要么消耗信用。
- 势能法(potential method):利用势能函数进行分析。
定义 表示第 次操作的实际成本, 表示第 次操作后的均摊成本。 表示第 次操作后的数据结构, 表示第 次操作后的势能函数。我们有: 只需要对于所有 都满足 ,就可以用均摊成本来确定实际成本的上限。一个好的势能函数的实现应该有 ,这样只需 。 均摊分析之势能法
现在问题的关键在于确定势能函数。如果简单的将节点高度和定义为势能函数,虽然量级正确了,但是在 Splay 的过程中有许多节点的高度会发生变化,且数量不确定,这样定义的势能函数很难分析。
一个可用的势能函数是树中所有节点的 之和,我们用 表示节点 的 ,有
TBD
3. Red Black Tree
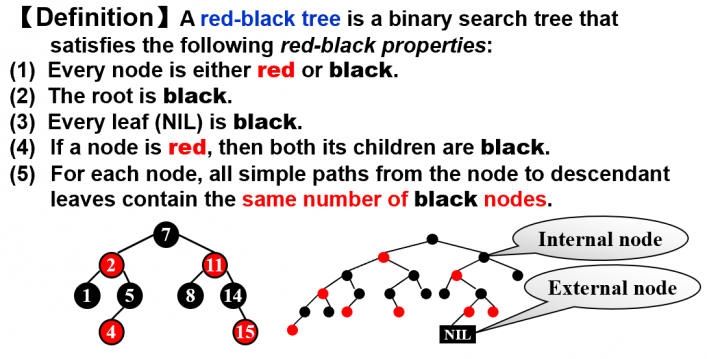
- 每条从叶子到根的路径中黑节点数 红节点数。
- 每个叶子结点的左右指针都指向 NIL,定义 NIL 都是黑节点。——补上 NIL 后,整棵树中的黑节点数 红节点数。
作出以下定义:
- The black-height of any node , denoted by :从节点 到任意叶子的最短路径上的黑点数量。
3.1. Insertion
这里介绍 bottom-up 的插入方法。红黑树是存在 top-down 的插入方式的,但这里不展开。
-
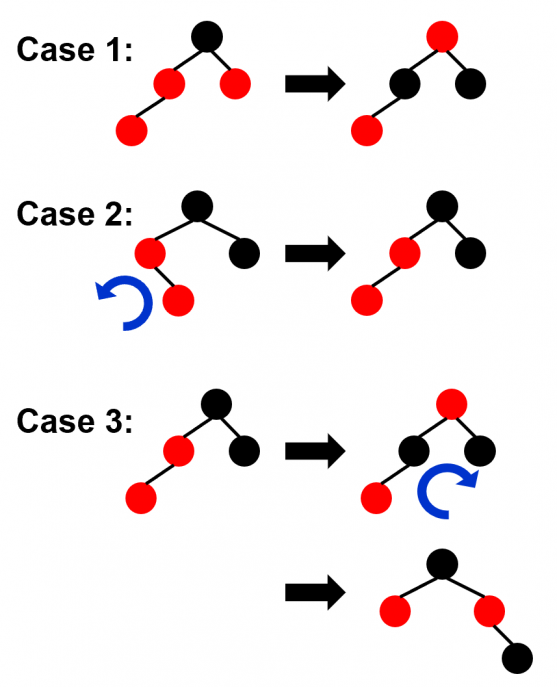
Step 1:先通过一次失败的查找确定要插入的位置(NIL 节点),将其替换为新节点并染成红色。由于新节点自带两个黑色的 NIL 结点,所以树的 black-height 不变,但可能出现连续的红节点。
-
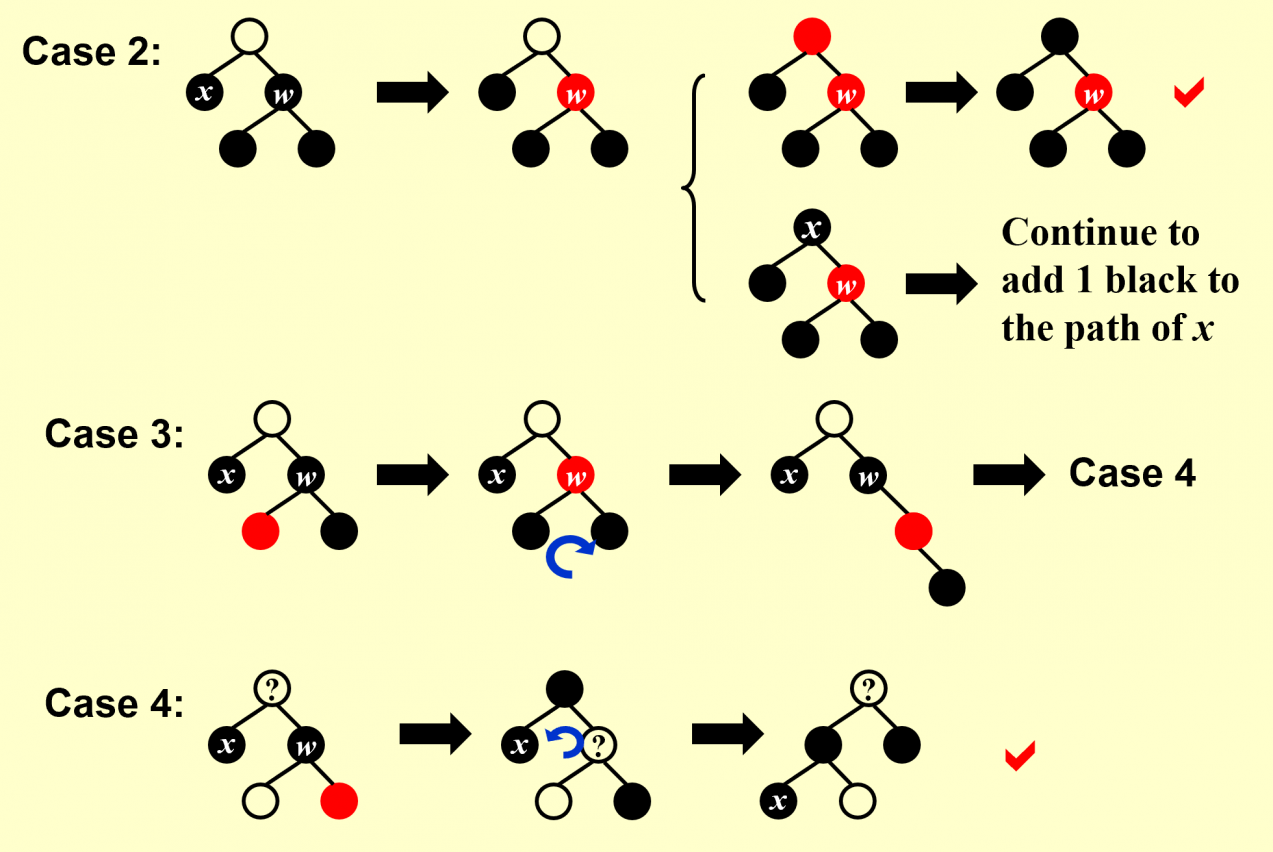
Step 2:自底向上处理连续的红节点的问题,分以下三种情况讨论:
3.2. Deletion
- 兄红转兄黑。父兄换色兄旋升。(case 1)
- 兄黑远黑近侄红,侄兄换色侄旋升。(case 3)
- 兄黑远红化其黑,父兄换色兄旋升。(case 4)
- 兄侄全黑则兄红,黑父不当则上传。(case 2)

4. B+ Tree
定义:A B+ tree of order is a tree with the following structural properties:
- (1) The root is either a leaf or has between and children.
- (2) All non-leaf nodes (except the root) have between and children.
- (3) All leaves are at the same depth.
可以注意到:
- B+ 树的所有数据都存储在叶子节点,非叶节点只存储索引信息。
- 每一个非叶节点上最多存储 个索引,每一个叶子节点上最多存储 个数据。
- 对于非叶节点的第 个索引,其值等于其第 个子树的叶子节点最小值。(根据这一性质可以进行查找)
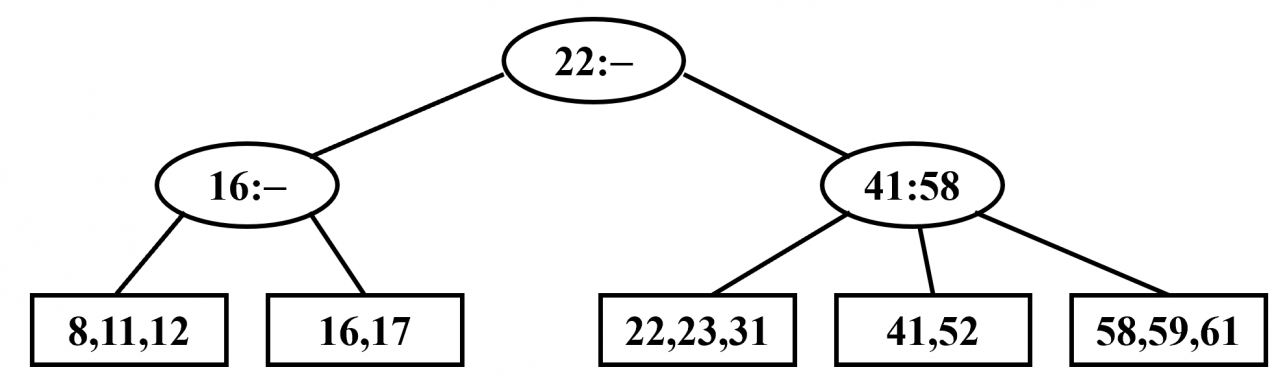 B+ 树示意图
B+ 树示意图
4.1. Split
B+ 树的核心在于其分裂操作。可以把 的限制看做对连出去的边数的限制,叶子节点相当于是连出去至多 条节点—数据的边,这样可以把非叶节点和叶子节点的情况统一看待。
当某个节点已经连出去 条边,需要塞第 条边的时候,需要分裂。分裂会产生一个和原节点同级的节点,就在原节点的右侧。原节点的前 个孩子还属于自己,剩下的 个孩子需要交给新创建的节点。
如果分裂的过程中,导致父节点也超出了 的限制,就需要对父节点也进行分裂,以此类推。如果父节点已经是根节点,就创建一个新根再进行分裂,此时树高会增加 ,其他情况下树高不会改变。
4.2. Insertion
先进行一次查找确定需要插入的节点并执行挂在那个叶子节点上,接下来进行 bottom-up 的维护即可。
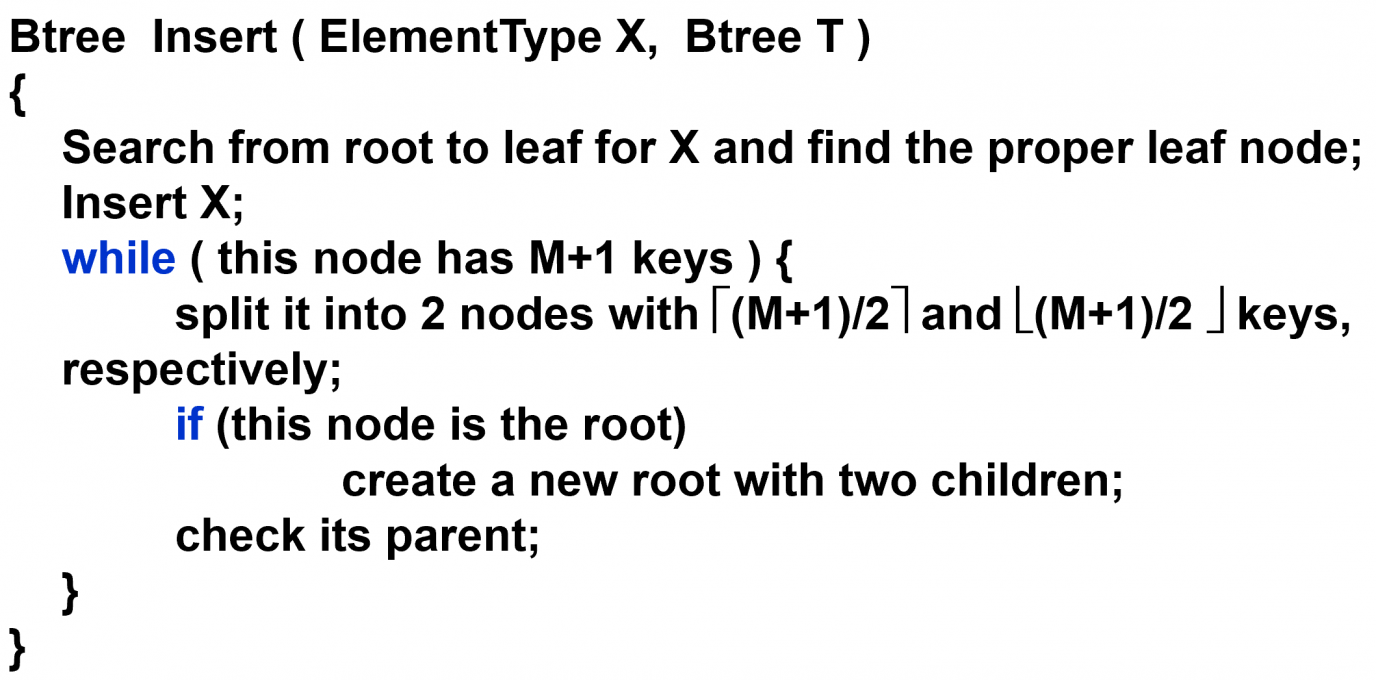 课件中给出的伪代码
课件中给出的伪代码
4.3. Complexity Analysis
一般来说我们取 (2-3 树)或 (2-3-4 树)。当 不是常数级别时,需要用二分查找对插入过程进行优化。
TBD:复杂度分析